ROBÓTICA


La robótica se extiende desde los primeros autómatas mecánicos de la antigüedad hasta los complejos sistemas automatizados del siglo XXI. Desdelaantigüedad,loshumanoshan estado explorando la idea de crear máquinas que imiten el comportamiento humano y animal. Mitos como el mito griego de Talos y los autómatas mecánicos del Renacimiento reflejan el deseo perdurable de transformar la inercia en realidad a través de la ingeniería y la imaginación. Hoy en día, la robótica cubre una amplia gama de aplicaciones, desde la medicina y la exploración espacial hasta la inteligencia artificial y los vehículos autónomos. Los avances en percepción artificial, aprendizaje automático y miniaturización permiten la creación de robots más complejos y versátiles que nunca, superando constantemente los límites de la interacciónentrehumanosyrobots.
La robótica es una disciplina que se ocupa del diseño, operación, manufacturación, estudio y aplicación de autómatas o robots. Para ello, combina la ingeniería mecánica, ingeniería eléctrica, ingeniería electrónica, ingeniería biomédica y las ciencias de la computación, así como otras disciplinas
El origen etimológico de la palabra robótica lo encontramos en el checo. En concreto, en la unión de dos términos: robota que puede definirse como “trabajo forzado” y en rabota que es sinónimo de “servidumbre”. De la misma forma, hay que subrayar que la primera vez que empieza a hacerse referencia más o menos a ella fue en el año 1920 en la obra del escritor Karel Capek titulada “Los robots universales de Rossum”

Grados de libertad del robot: se define como la capacidad de movimiento . giratorio o de desplazamiento que tiene.
Zonas de trabajo y dimensiones del brazo o manipulador: Las dimensiones necesarias de los componentes del brazo o manipulador unido a los grados de libertad determinan la zona de trabajo de un robot.
Capacidad de carga: Se define como capacidad de carga la cantidad de kilogramos (peso) que puede ser transportado por la herramienta de agarre del brazo o manipulador.
Funciones de Exactitud y Repetibilidad:


Esta característica envuelve los siguientes puntos:
Resolución: Los sistemas digitales y otros factores hacen que solo estén disponibles un limitado número de posiciones, por lo que usuario debe ajustar las coordenadas a la posición discreta que más se ajuste a las necesidades de funcionamiento del robot.
Cinemática del error modelado: los cálculos sobre ángulos de juntura pueden tener en algunas ocasiones pequeños errores, esto se debe a que el
modelo de la cinemática del robot no lo empareja con total exactitud.
Errores en la calibración: durante el proceso de calibración la posición determinada puede estar ligeramente desorientada, esto produce un error en la posición calculada.
Resolución espacial: Indica el aumento más pequeño de movimiento en que un robot puede dividir su intensidad de trabajo.
Programabilidad: Los componentes controladores fabricados con micro y nanoelectrónica incluidos en los módulos de control de los robots industriales permiten una programación eficiente del robot en cuanto a su espacio de trabajo, su velocidad y aceleración, pausas y temporizaciones, sincronización y funciones de seguridad.
2
Asimo, el robot humanoide más avanzado del mundo. Creado por Honda Robotics.
1. Los robots son más inteligentes que las personas. Con el desarrollo de la inteligencia artificial y el machine learning los robots han evolucionado y parece que podrían tener la misma inteligencia que los humanos, pero lo cierto es que no tienen facultades que son plenamente humanas como la capacidad de aprender de la experiencia, la empatía, la habilidad de reaccionar ante situaciones desconocidas, la improvisación o la creatividad, entre otras
5.
Los robots no se equivocan. Es cierto que los robots pueden cometer menos errores que una persona, pero si la información sobre la que trabajan no está bien configurada o existen demasiadas excepciones en los procesos, surgirán errores Por lo tanto, las personas deberán controlar el trabajo de los robots para que se desarrollen correctamente.

Los robots no descansan nunca. Es cierto que los robots no se cansan nunca y que pueden trabajar 365 días al año, 7 días a la semana y 24 horas al día, sin embargo, necesitan tareas de mantenimiento (tanto si se trata de robots hardware como software), por lo que tendrán algunos momentos de inactividad.
3. Los robots quitan puestos de trabajo. Un robot no sustituye el trabajo de una persona, sino que el robot complementa el trabajo de esa persona y la ayuda a que sea más efectivo, liberándola de tareas repetitivas y tediosas. De esta forma los empleados podrán aportar valor a la empresa. Por otro lado, son las personas las que deberán controlar al robot para que haga las tareas correctamente Finalmente, se considera que los robots han contribuido a crear empleo 4
Todos los trabajos se pueden hacer por robots. No es cierto. Hay trabajos que son más susceptibles de automatizarse, como tareas de escritorio (abrir correos, archivarlos, conciliación bancaria etc ), sin embargo, hay otros que no, como el cuidado de animales al aire libre o la reforestación de un bosque
1 "Blade Runner" de Philip K Dick: La novela de Dick, y su posterior adaptación cinematográfica, presentan un futuro distópico en el que los replicantes, androides casi indistinguibles de los humanos, cuestionan la naturaleza de la identidad y la humanidad
"Frankenstein" de Mary Shelley: Aunque no es una historia específicamente sobre robots, "Frankenstein" es considerada una de las primeras obras de la literatura que aborda las implicaciones de crear una forma de vida artificial. La novela explora los dilemas morales y las consecuencias de dar vida a una criatura hecha por el hombre
2 WALL-E (Película de 2007): El robot basurero WALL-E Pixar nos traslada hasta el año 2800, cuando ya no hay signo de vida humana en la Tierra, y nos hace vibrar con una bonita historia entre dos robots que se enamoran y viajan para salvar la naturaleza y la humanidad
3 "RUR" (Rossum's Universal Robots) de Karel Čapek: Esta obra de teatro checa, escrita en 1920, introdujo el término "robot" al mundo "RUR" presenta una sociedad en la que los robots son creados como trabajadores serviciales, pero finalmente se rebelan contra sus creadores
5
4 "Yo, Robot" de Isaac Asimov: Esta colección de cuentos cortos de ciencia ficción escrita por Asimov se centra en las Tres Leyes de la Robótica, que establecieron principios éticos para la interacción entre humanos y robots Los relatos exploran los dilemas éticos y las implicaciones de la inteligencia artificial
Siglo I a. C.y antes
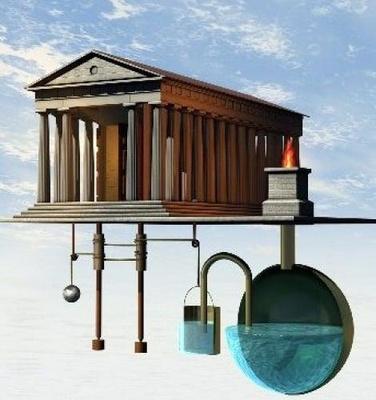
Se ven descripciones de más de 100 máquinas y autómatas, incluyendo un artefacto con fuego, un órgano de viento, una máquina operada mediante una moneda, una máquina de vapor, en Pneumática y Autómata de Herón de Alejandría

1495
Diseño de un robot humanoide, este era un caballo mecánico creado por Leonardo Da Vinci.
1956
Primer robot comercial, de la compañía Unimation fundada por George Devol y Joseph Engelberger, basada en una patente de Devol6 De nombre Unimate, es considerado el primer robot industrial, utilizado para elevar cargas pesadas.
1973
Primer robot con seis ejes electromecánicos, creado por KUKA Robot Group, con el nombre Famulus
1942
La revista Astounding Science Fiction publica "Círculo Vicioso" (Runaround en inglés). Una historia de ciencia ficción donde se da a conocer las Tres leyes de la robótica
2000
Lanzamiento del robot humanoide capaz de desplazarse de forma bípeda e interactuar con las personas, creado por Honda Motor Co Ltd, con el nombre de Asimo

1800s
Juguetes mecánicos japoneses que sirven té, disparan flechas y pintan, llamados karakuri, creados por Hisashige Tanaka.
1939/1940
Se exhibe un robot humanoide en la Exposición Universal, llamado Elektro, creado por Westinghouse Electric Corporation. Entre sus habilidades, podía hablar (con un vocabulario de 700 palabras grabadas en un fonógrafo), caminar, mover la cabeza y los brazos, fumar cigarrillos e inflar globos.


La suma de la robótica y la IA ha hecho que los robots del presente sean más sofisticados, capaces de realizar operaciones cada vez más precisas y sensibles. Pero su objetivo sigue siendo el mismo: conseguir sistemas lo más autónomos posibles e independientes de la actuación humana.

La fase antigua de la robótica se caracterizaba por la presencia de máquinas mitológicas y autómatas mecánicos. Aunque no son robots en el sentido moderno, estas creaciones lograban reflejar el deseo de la humanidad de crear seres artificiales con habilidades y capacidades especiales. Especialmente autómatas mecánicos. Demostraron un ingenio y una sofisticación extraordinarios, sentando las bases para el desarrollo de la robótica moderna
• Según registros históricos, los primeros autómatas datan del Antiguo Egipto Los antiguos griegos llevaron la robótica a un nivel mucho más allá de su uso en rituales religiosos Entre sus creaciones destacan estatuas con brazos móviles, aves que imitaban el vuelo, estatuas que servían vino y puertas automáticas.

El desarrollo de la industria robótica está marcado por la aparición de los robots Manipulador programable y los primeros robot comerciales, mejorado eficiencia y seguridad de la línea de producción esta etapa especial. Simboliza el comienzo de una nueva era de robots , integrándose en la sociedad humana y en el entorno industrial. Fueron impulsadas por el descubrimiento y uso del carbón mineral, el gas natural, la electricidad, la electrónica, la energía nuclear, internet y las energías renovables.
•Desde las primeras máquinas de vapor hasta los robots colaborativos en fábricas inteligentes, el mundo industrial ha experimentado grandes transformaciones en los últimos siglos
•Ejemplos a mencionar: Robot Móvil Autónomo (AMR) y Manipulador Móvil: El IFR clasifica a los AMR como robots de servicio aunque, como se comenta en el punto anterior, se utilizan a menudo en entornos industriales Si la plataforma -AMR-está equipada con un brazo robótico, pasa a ser unmanipulador móvily se contaría por tanto, como un robot industrial
La fase futurista de la robótica moderna se caracteriza por rápidos avances tecnológicos y una amplia gama de nuevas posibilidades La robótica autónoma y el aprendizaje automático permiten que los robots aprendan y se adapten por sí solos, mientras que la robótica blanda utiliza materiales flexibles para crear
Se ven robots más adaptables e interactivos Investigación general en inteligencia artificial (A9i) La búsqueda de crear máquinas con inteligencia a nivel humano Esto podría tener profundas consecuencias para el futuro de la robótica y de la sociedad en su conjunto
A pesar de que se siguen desarrollando robots para usos industriales, en la actualidad se está avanzando en la combinación de la robótica con la inteligencia artificial para imitar al ser humano. La primera generación engloba los robots manipuladores, que son aquellos que repiten una o varias tareas de manera programada bajo un software, en secuencia
•Un ejemplo que podemos mencionar esAsimo.Enelaño2000,Honda presentó el ASIMO (Advanced Step in InnovativeMobility),unrobot androidede120cmdealturay43kgde peso Con el diseño y desarrollo de ASIMO se pretende ayudar a las personas que carecen de movilidad completaensuscuerpos,asícomopara animaralajuventudpara estudiarcienciasymatemáticas

A través de los años se desarrollaron muchos otros robots inteligentes que, según la Asociación Francesa de Robótica Industrial – AFRI, fueron clasificados en generaciones según su cronología. En la primera generación se ven los robots manipulares, son sistemas mecánicos multifuncionales con un sistema de control sencillo, bien manual, de secuencia fija o de secuencia variable, que realizan una tarea según una serie de instrucciones programadas previamente, que ejecutan de forma secuencial, como puede ser es el típico brazo mecánico destinado a la manipulación
En la segunda generación podemos ver lo que son robots de aprendizaje; estos incluyen sensores especiales y sistemas de retroalimentación, que les permite captar las tareas que debe hacer, como iCub, un robot de grado de investigación diseñado para ayudar a desarrollar y probar algoritmos de IA incorporados.
En la tercera generación se empiezan a utilizar robots con sensores o robots sensorizados, utilizados en áreas en las que se realiza múltiples tareas, ya que al ser programables los humanos pueden controlar su sistema mecánico a medida que necesiten ejecutar cada una como ARMAR III, creado para realizar tareas hogareñas
En la cuarta generación se encuentran los robots móviles, los cuales son capaces de participar en diversos procesos gracias a la inteligencia artificial. Envuelven varias de las características de las generaciones pasadas para un mejor desempeño en los trabajos asignados. Por ejemplo tenemos a la robot Sophia, que ha sido diseñada para aprender, adaptarse al comportamiento humano y trabajar con estos satisfactoriamente, busca combatir con explotaciones como, animal, infantil, trata de personas, etc.
Finalmente, en la quinta generación se encuentran las máquinas más dotadas de inteligencia artificial, aquellas con sistemas mecánicos de autónomo alcance a la hora de realizar tareas Permiten que se desplacen, ya sean ruedas o piernas artificiales Resultandos útiles en tareas de construcción, manufactura, diseño, entre otras parecidas.
La taxonomía arquitectónica de los robots se refiere a la clasificación o categorización de los robots según su estructura y configuración física.
Los robots manipuladores son los más comunes y se usan para tareas repetitivas en la industria y la manufactura; como ejemplo, podemos mencionar los brazos manipuladores, que pueden moverse y posicionar herramientas o cargas en un espacio tridimensional. Los robots móviles se utilizan para movilidad en diferentes terrenos, ya sea terrestre, diseñados para moverse sobre superficies terrestres, como robots con ruedas, orugas o patas, como los clasificadores de artículos.
Aéreo, que son aquellos que incluyen aeronaves no tripuladas que pueden volar de manera autónoma o controlada remotamente como los drones; o marinos, diseñados para operar en entornos acuáticos, como submarinos autónomos y vehículos operados a distancia como el Nereus es un AUV americano construido por el Instituto Oceanográfica Woods Hole (WHOI). Es un vehículo submarino híbrido y autónomo (HROV) manejado por control remoto que entró en servicio en el año 2009.
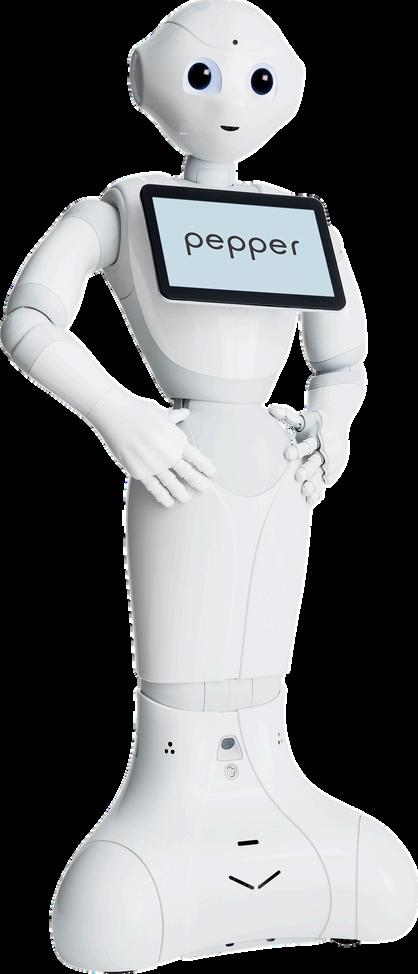
Los robots híbridos combinan las características de los robots manipuladores y móviles, capaces de interactuar de forma segura con humanos en entornos compartidos. Finalmente, los robots humanoides, diseñados para imitar aspectos de la estructura y el comportamiento humanos, con el objetivo de realizar tareas que requieren interacción directa con el entorno humano o que se benefician de una forma de locomoción y manipulación similar a la humana, como el robot Pepper, que sirve para provocar una conexión y un sentimiento de empatía entre el robot y la persona, lo que favorece para que la comunicación sea efectiva Puede trabajar en cualquier ambiente profesional y de la manera más natural posible encajando en cada situación que se le presente





La robótica ha experimentado una importante evolución desde sus inicios hasta la actualidad, cambiando todos los aspectos de la sociedad y la industria. Desde las primeras máquinas controladas mecánicamente hasta los robots autónomos inteligentes de hoy, hemos visto importantes avances en la fabricación, la exploración espacial, la medicina y la asistencia personal. Esta evolución está impulsada por avances tecnológicos clave, como la inteligencia artificial, sensores avanzados, materiales más ligeros y resistentes y algoritmos de control más sofisticados. Estos elementos permiten a los robots no sólo realizar tareas repetitivas y peligrosas de manera más eficiente, sino también colaborar con humanos en entornos complejos y dinámicos.
EmpresaActual. (2022, 11 de noviembre). Evolución y tendencias de la robótica industrial . Empresa Real. https://www.empresaactual.com/evolucion-y-tendenciasde-la-robotica-industrial/ Bautista, J. (2015, 21 de diciembre). Evolución de la robótica . Monografias.com. https://www.monografias.com/trabajos107/evolucionrobotica/evolucion-robotica
Las Taxonomías de la robótica dividida en Cronología y Arquitectónica . (Dakota del Norte). Issuu. https://issuu.com/anakarina 27/docs/investigaci n 2 la r ob tica ana karina s nchez 10/s/27398208 Robotnik. (2021, 4 de noviembre). Historia de los robots y la robótica . Robotnik. https://robotnik.eu/es/historia-delos-robots-y-la-robotica/